Rather unintentionally some 7 years ago (to the day!) I was playing with an early gopher server on Linux, musing that one day it’d be cool to run it fully on A/UX (what is it anyways?!). And thanks to Qemu’s 68040 support the time is at hand.
First off I need to run this on Linux so I’ll need to build the appropriate branch myself. Thankfully Cat_7 has boiled it down to a really simple formula:
git clone -b q800.upstream https://www.gitlab.com/mcayland/qemu q800-upstream
cd q800-upstream
./configure --target-list=m68k-softmmu --enable-gtk --enable-sdl
makeIn my case I remove the gtk and sdl as I’m running this headless.
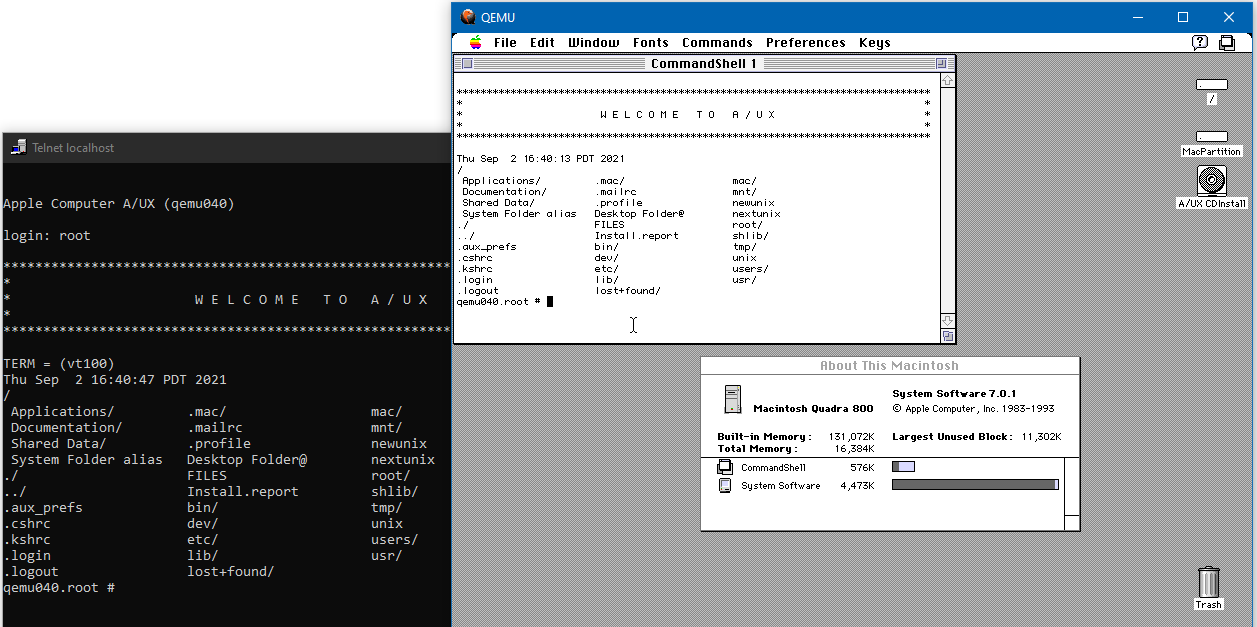
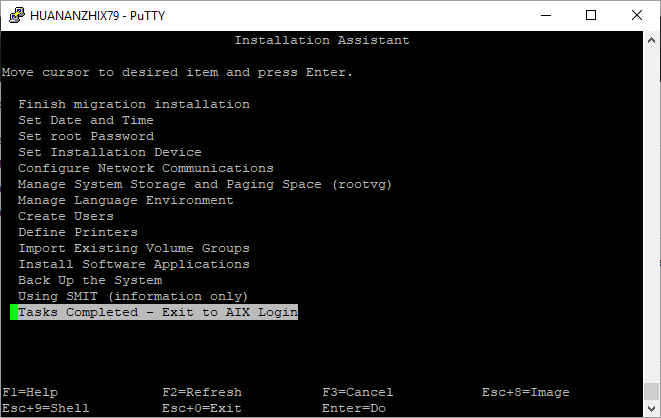
Now onto the OS itself. While I had numerous images built over the years for Shoebill there was one major issue when compared to Qemu, and that is Shoebill loads the kernel directly while Qemu emulates the hardware so it will boot MacOS 7 directly. While on the surface this is mundane that does mean however that none of my images will actually work on Qemu as they don’t include a blessed copy of System 7. Not that I care that much I could always do a simple dump/restore [ dump.bsd 0f – /dev/rdsk/c0d0s0 | (cd /mnt; restore xf -) ] of my A/UX stuff that I care about anyways. Luckily since I had added that SCSI file support to Cockatrice I could still partition out some disks and install from there.
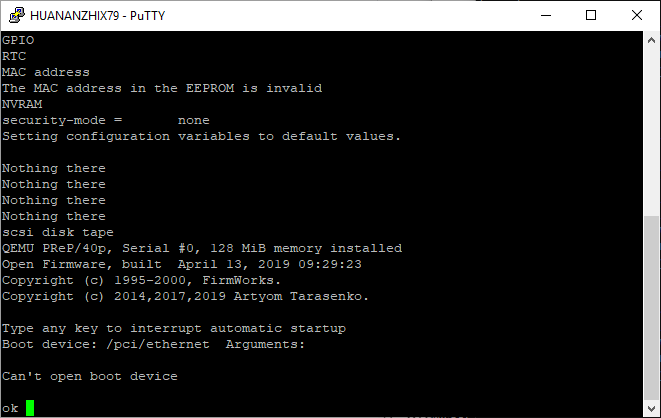
Now for the further bit of bad news for me is that I found that the 68020 based Shoebill ran 3.0.0 far more stable than 3.0.1 or 3.1. So I’d built everything around 3.0.0. And of course trying to boot 3.0.0 on a Quadra 800 just gives you a hard lock up. I don’t have the setup disk for 3.0.0 but mounting the CD-ROM gives you access to the disk tool (the 3.0.0 version doesn’t check for the Apple string on SCSI ROMS so you can partition with that as well). Anyways too much time thinking I’d done something wrong until this had to be pointed out to me:
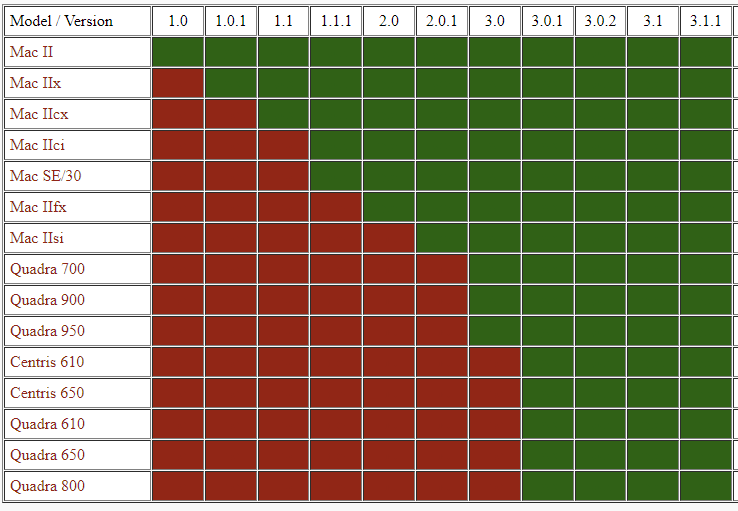
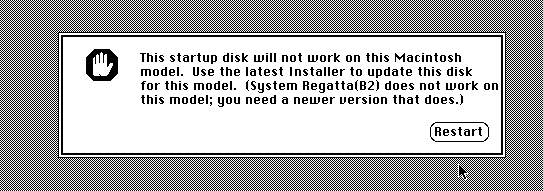
That’s right, 3.0.0 doesn’t run on the Quadra 800. Much longer ago I had a Quadra 950, fantastic beast of a machine, and yes it ran 3.0.0 just great. So shockingly running the right versions got me up to a working system just fine.
Now of course back in the Shoebill days I got ‘3.0.1’ kind of working by cheating. The /mac programs didn’t work on Shoebill however I could copy them over from 3.0.0 to get a working system. Could I substitute a 3.0.1 kernel & /mac directory onto a 3.0.0 system?
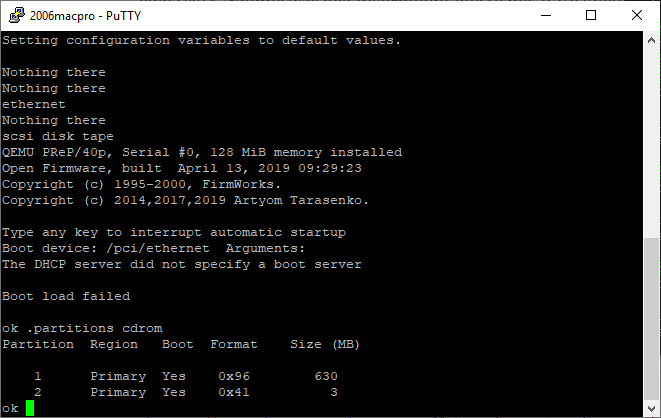
So first up the System 7 install from A/UX 3.0.0 is too old for a Quadra 800. Obviously just use the one from 3.0.1. Great.

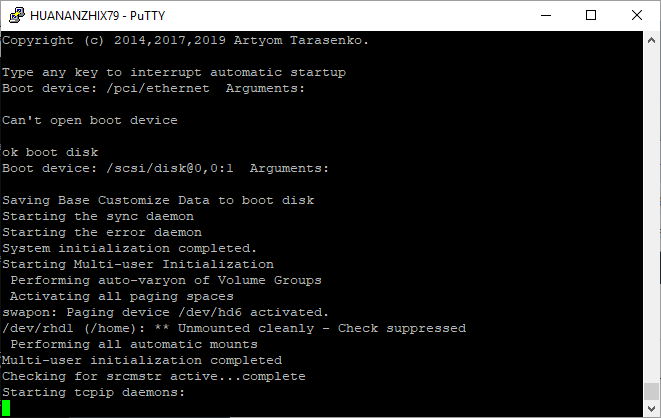
This lead to a problem where the root filesystem always needs to be checked in single user mode. Something that is shockingly hard to do when your Quadra runs so fast as you have less than a second to hit the ‘top’ button to halt the autoload.
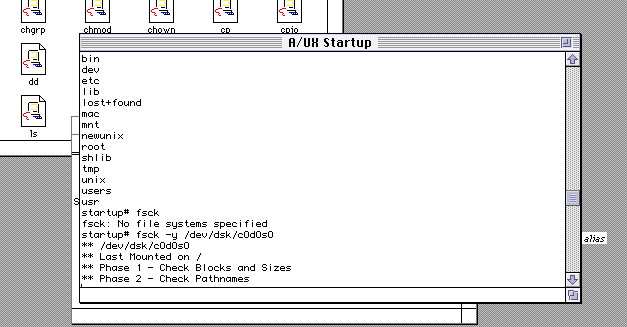
Naturally the standalone runs fine, with no errors.
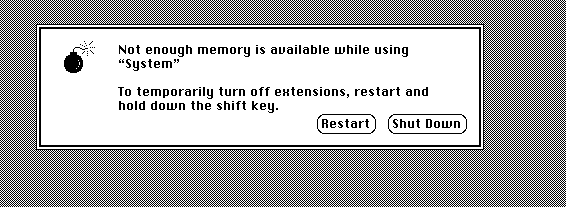
Thinking that it’s the start-up scripts I remove all the fsck’s and then get this message:
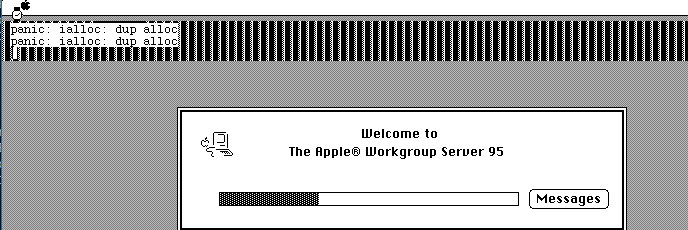
Great a kernel panic. ialloc: dup alloc. Thinking that maybe it’s confusing the UFS, I go ahead and format the disk in SYSV and restore the image onto that.
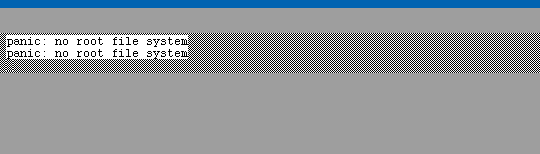
This gets me another kernel panic, this time no root filesystem. Surprise the SYSV filesystem was made optional in a default install. I run ‘newconfig sysv’ from 3.0.1 and copy that kernel back, and for good measure the shared libraries from 3.0.1. Now I get a different error:
Interesting, I try to hit restart, and instead I get dumped into text mode!
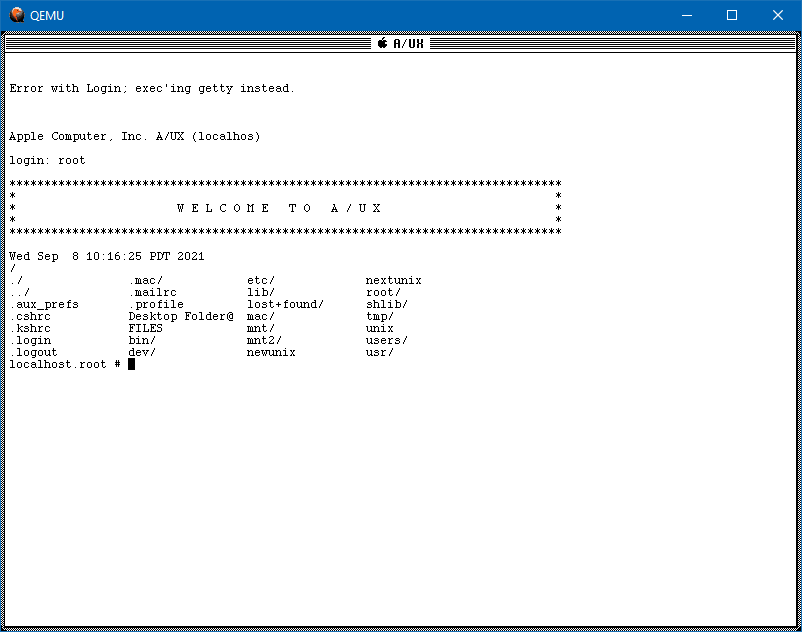
So here we are a 3.0.1 kernel with a 3.0.0 userland! I’m going to use this as a server anyways so I don’t really care about the Mac UI. Naturally so many twists and turns I’ll just skip to the end. Networking didn’t work correctly. Maybe I should have copied all the network stuff from 3.0.1 over but at this point it’s basically a 3.0.1 system so why even bother?
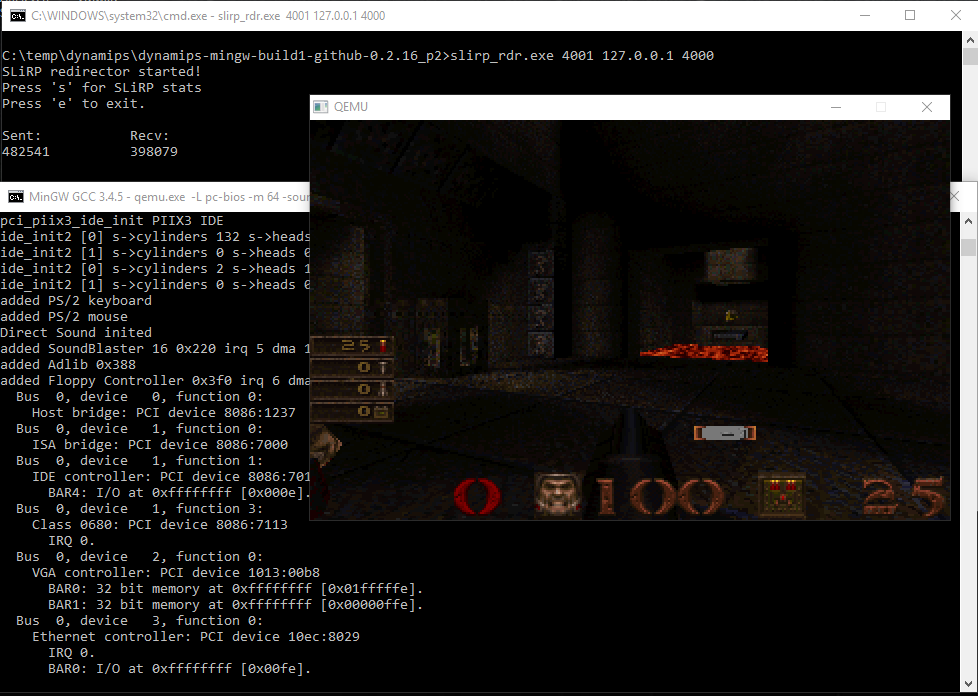
So the next thing of course is just to setup Qemu to listen on a loopback and add some disks. A lot of disks.
./qemu-system-m68k \
-L pc-bios \
-m 256 \
-M q800 \
-vnc 10.11.0.1:35 \
-serial stdio \
-bios Quadra800.rom \
-net nic,model=dp83932,netdev=ne -netdev user,id=ne,hostfwd=tcp:10.11.0.1:42323-:23,hostfwd=tcp:10.11.0.1:40070-:70,hostfwd=tcp:10.11.0.1:40080-:80 \
-drive file=pram-aux.img,format=raw,if=mtd \
-device scsi-hd,scsi-id=0,drive=hd0,vendor="SEAGATE",product="ST225N",ver="1.0" \
-drive file=scsi0.vmdk,media=disk,format=vmdk,if=none,id=hd0 \
-device scsi-hd,scsi-id=1,drive=hd1,vendor="SEAGATE",product="ST225N",ver="1.1" \
-drive file=scsi1.vmdk,media=disk,format=vmdk,if=none,id=hd1 \
-device scsi-hd,scsi-id=2,drive=hd2,vendor="SEAGATE",product="ST225N",ver="1.2" \
-drive file=scsi2.vmdk,media=disk,format=vmdk,if=none,id=hd2 \
-device scsi-hd,scsi-id=3,drive=hd3,vendor="SEAGATE",product="ST225N",ver="1.3" \
-drive file=scsi3.vmdk,media=disk,format=vmdk,if=none,id=hd3 \
-device scsi-hd,scsi-id=4,drive=hd4,vendor="SEAGATE",product="ST225N",ver="1.4" \
-drive file=scsi4.vmdk,media=disk,format=vmdk,if=none,id=hd4 \
-device scsi-hd,scsi-id=5,drive=hd5,vendor="SEAGATE",product="ST225N",ver="1.5" \
-drive file=scsi5.vmdk,media=disk,format=vmdk,if=none,id=hd5 \
-device scsi-hd,scsi-id=6,drive=hd6,vendor="SEAGATE",product="ST225N",ver="1.6" \
-drive file=scsi6.vmdk,media=disk,format=vmdk,if=none,id=hd6
One nice thing is that since we are on Qemu I don’t have to use raw disk images, I can zero stuff out and use VMDK’s. Nice. I guess I could bridge the VM later, but for now NAT is fine enough as all I need is telnet & gopher. So I grab gopher2_3.1.tar.gz, rebuild and move over my gopher site from Linux into A/UX and I’m up and running in no time. It was shockingly easy. I update a few things to reflect it running on A/UX now.
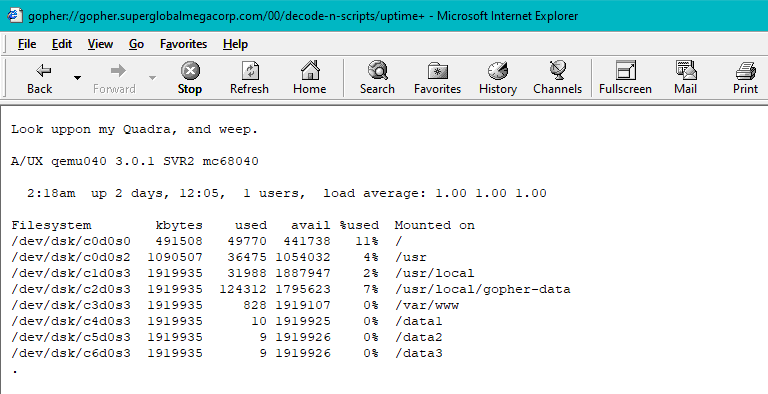
And just like that I took my semi popular gopher site, and moved it to A/UX seven years after thinking that this would be a ‘good idea(tm)’. I’m sure it won’t backfire spectacularly.
I don’t know if any of this is useful or interesting but it was to me. It’s been nice that Qemu has been able to keep uptime in several days, I had 3 days of uptime before I took it down to max out the storage so I could possibly do more with it.
Naturally it’s still available as gopher://gopher.superglobalmegacorp.com